Lab: Introduction to ROS2 tools
Today's Lesson
Practice :
RVIZ
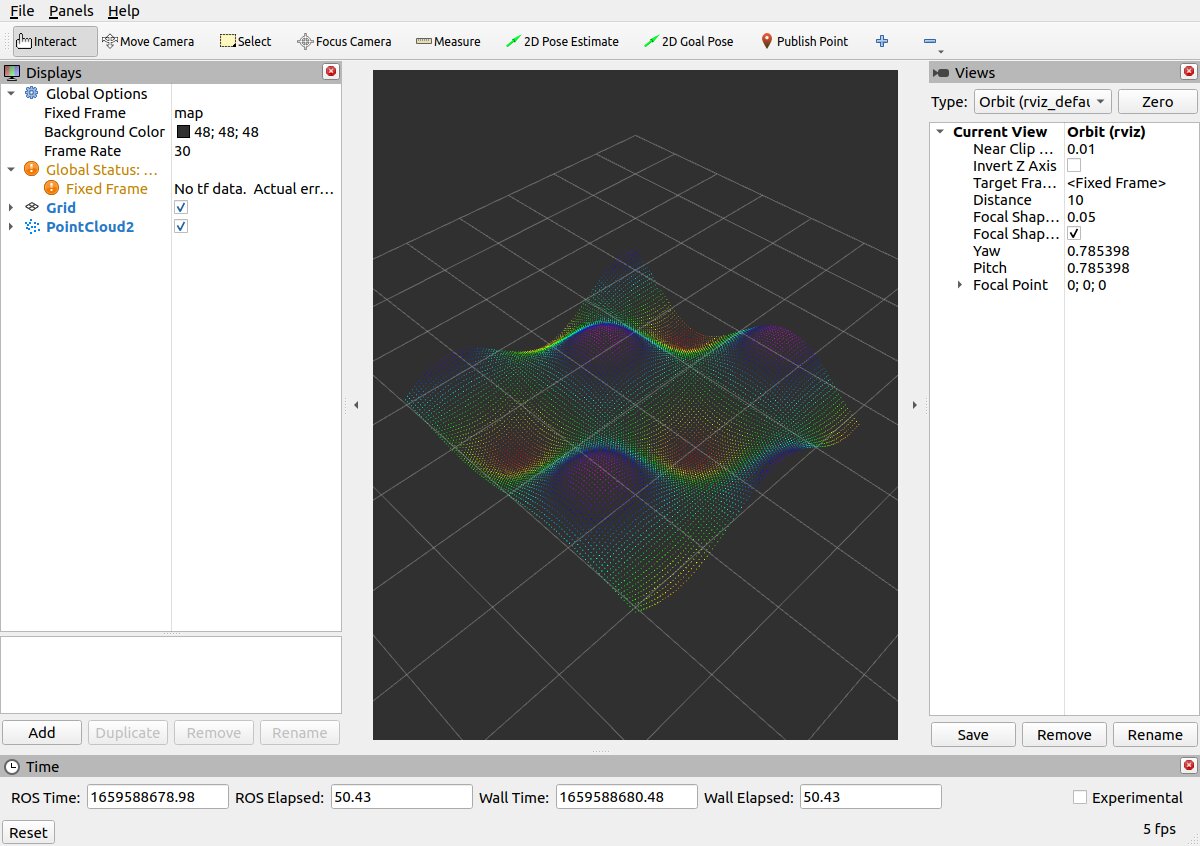
rviz is a tool to simulate, publish and visualize ROS 2 sensor data.
Let's simulate a point cloud sensor :
pointCloudPublisher.py
import numpy as np
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import PointCloud2
from sensor_msgs.msg import PointField
from sensor_msgs_py import point_cloud2
from std_msgs.msg import Header
class PointCloudPublisher(Node):
rate = 30
moving = True
width = 100
height = 100
header = Header()
header.frame_id = 'map'
dtype = PointField.FLOAT32
point_step = 16
fields = [PointField(name='x', offset=0, datatype=dtype, count=1),
PointField(name='y', offset=4, datatype=dtype, count=1),
PointField(name='z', offset=8, datatype=dtype, count=1),
PointField(name='intensity', offset=12, datatype=dtype, count=1)]
def __init__(self):
super().__init__('pc_publisher')
self.publisher_ = self.create_publisher(PointCloud2, 'test_cloud', 10)
timer_period = 1 / self.rate
self.timer = self.create_timer(timer_period, self.timer_callback)
self.counter = 0
def timer_callback(self):
self.header.stamp = self.get_clock().now().to_msg()
x, y = np.meshgrid(np.linspace(-2, 2, self.width), np.linspace(-2, 2, self.height))
z = 0.5 * np.sin(2*x-self.counter/10.0) * np.sin(2*y)
points = np.array([x, y, z, z]).reshape(4, -1).T
pc2_msg = point_cloud2.create_cloud(self.header, self.fields, points)
self.publisher_.publish(pc2_msg)
if self.moving:
self.counter += 1
def main(args=None):
rclpy.init(args=args)
pc_publisher = PointCloudPublisher()
rclpy.spin(pc_publisher)
pc_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
package.xml
$ colcon build --packages-select iml_buche_test_2
$ rviz2
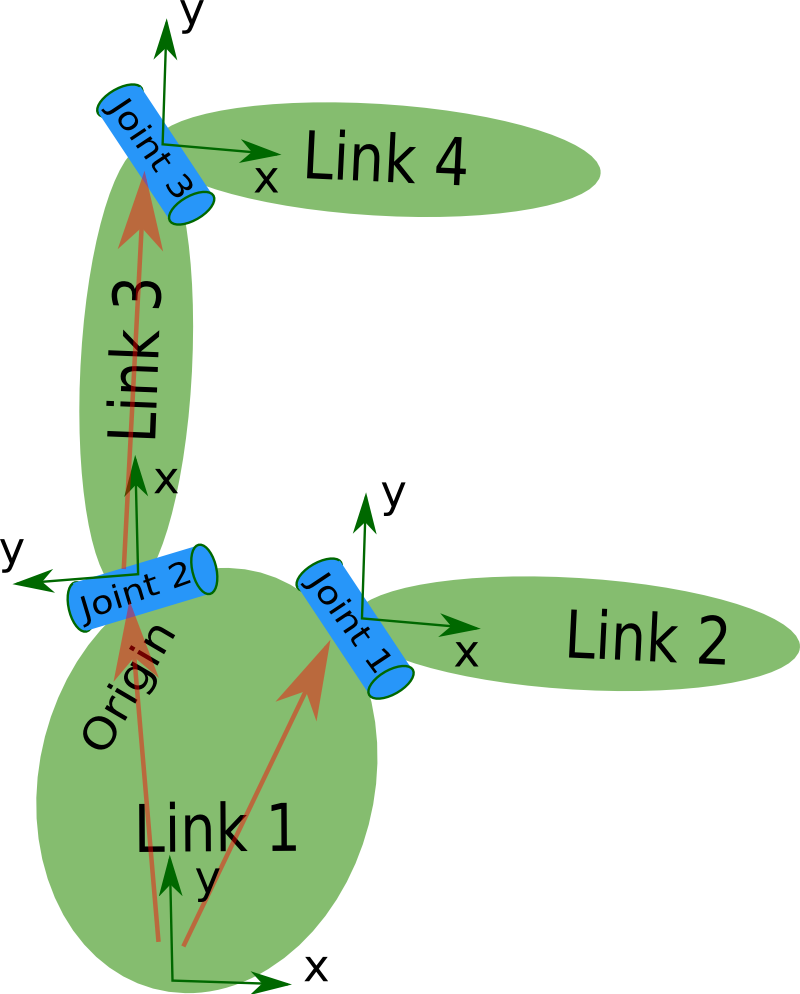
URDF
URDF is used to describe kinematic and dynamic properties of a robot. It is written in XML and commonly used in ROS applications.
Let's try to code the following structure :
 Create a directory for urdf files (inside the package):
Create a directory for urdf files (inside the package):
mkdir urdf
my_robot.urdf and place it in ros2_ws/src/iml_buche_test_2/urdf/
$ check_urdf my_robot.urdf
$ urdf_to_graphviz my_robot.urdf
$ evince test_robot.pdf
LAUNCH
A launch file helps to run a complex ROS 2 system.
Modify
setup.py to add path to launch files (+ udrf files + world files)
from setuptools import setup
import os
from glob import glob
package_name = 'iml_buche_test_2'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name), glob('launch/*.py')),
(os.path.join('share', package_name), glob('urdf/*')),
(os.path.join('share', package_name), glob('worlds/*')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='buche',
maintainer_email='buche@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'test_python_receiver_node = iml_buche_test_2.receiver:main',
'test_python_publisher_node = iml_buche_test_2.publisher:main',
'test_python_pointCloud_node = iml_buche_test_2.pointCloudPublisher:main'
],
},
)
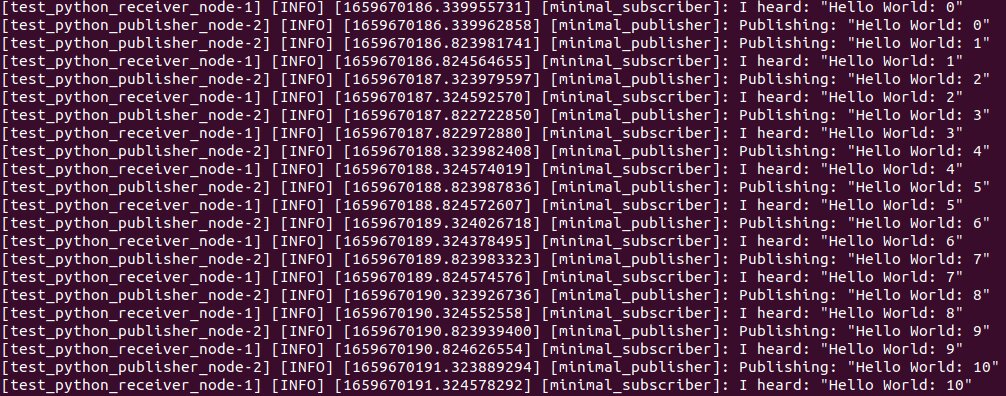
Launch file - Nodes
A launch file enables you to launch multiple ROS 2 nodes at the same time.
ros2 launch package_name launch_file_name
mkdir launch
iml_test.launch.py (inside the launch directory) with the following skeleton:
import launch
import launch_ros
def generate_launch_description():
return launch.LaunchDescription([
# launch actions here...
])
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, ExecuteProcess
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
package_dir=get_package_share_directory('pkgname')
urdf = os.path.join(package_dir,'urdf_file.urdf')
return LaunchDescription([
# publishes TF for links of the robot without joints
Node(
package='iml_buche_test_2',
executable='test_python_receiver_node',
output="screen"
),
Node(
package='iml_buche_test_2',
executable='test_python_publisher_node',
output="screen"
)
])