Utilisation des fonctions de tâches. Tâche principale : Assurer la stabilité du robot. Tâches secondaires : Eloignement des butées, minimiser des critères énergétiques.
(cinématique.mpg ) (énergetique.mpg)
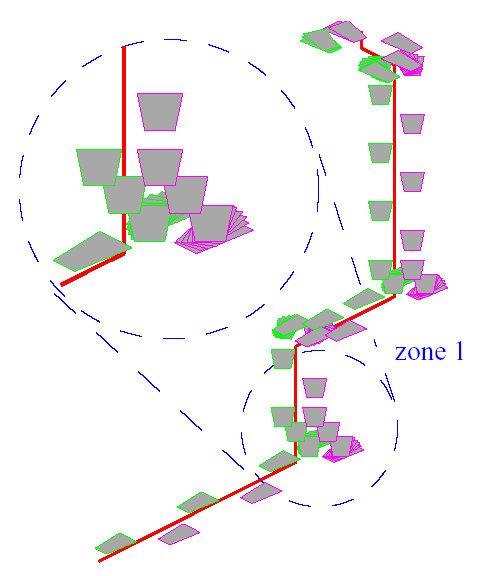
Planification de chemin pour robots bipède.
Détermination heuristique A* appliquée aux contraintes de la marche bipède.
Détermination d'une marche avec double support.
Influence de la configuration pré-impact sur le double impact.
II - Mécanique non régulière
Poursuite de trajectoires pour des systèmes soumis à des impacts.
Succession de mouvements libres et de mouvements contraints.
Impact (discontinuité de la vitesse aux instants impacts).
Schéma de commande hybride.
Extension des commandes dites passives.
liens vers mon manuscrit de these
III - Circuits électriques (Switched Complementarity Systems)
Modélisation des convertisseurs statiques
Utilisation du formalisme des systèmes de complémentarité pour l?étude d?une classe particulière de Systèmes Dynamiques Hybrides : les convertisseurs statiques (Onduleurs, Hacheurs ?).
The opinions or statements expressed herein should not be taken as a position or endorsement of ENIB.
Ces pages personnelles n'expriment pas la position de l'ENIB.
 (cinématique.mpg ) (énergetique.mpg)
(cinématique.mpg ) (énergetique.mpg)